
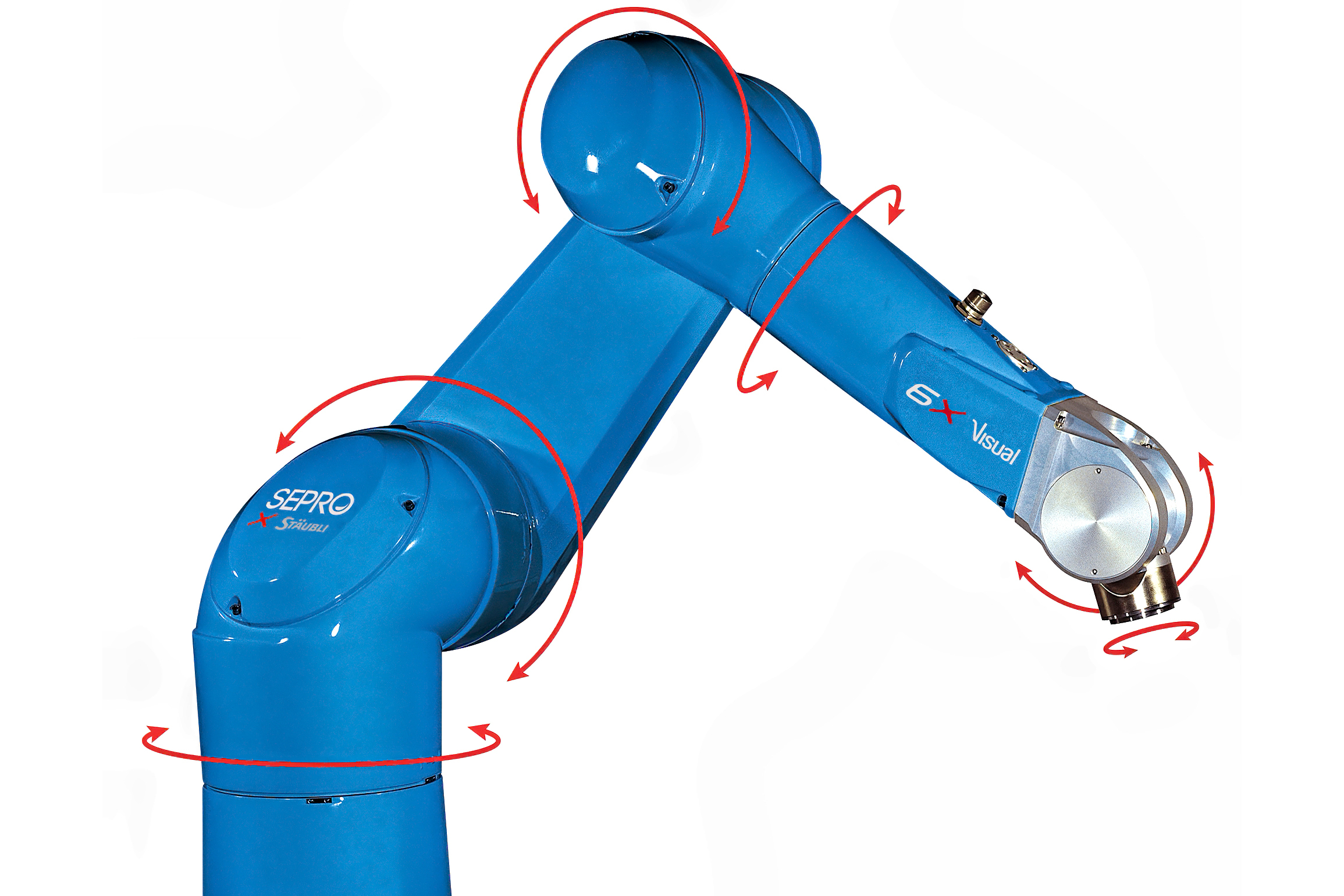
Six-axis articulated-arm robots get their name from the six distinct rotations that allow them to grip an object at almost any angle and at almost any point within their reach.
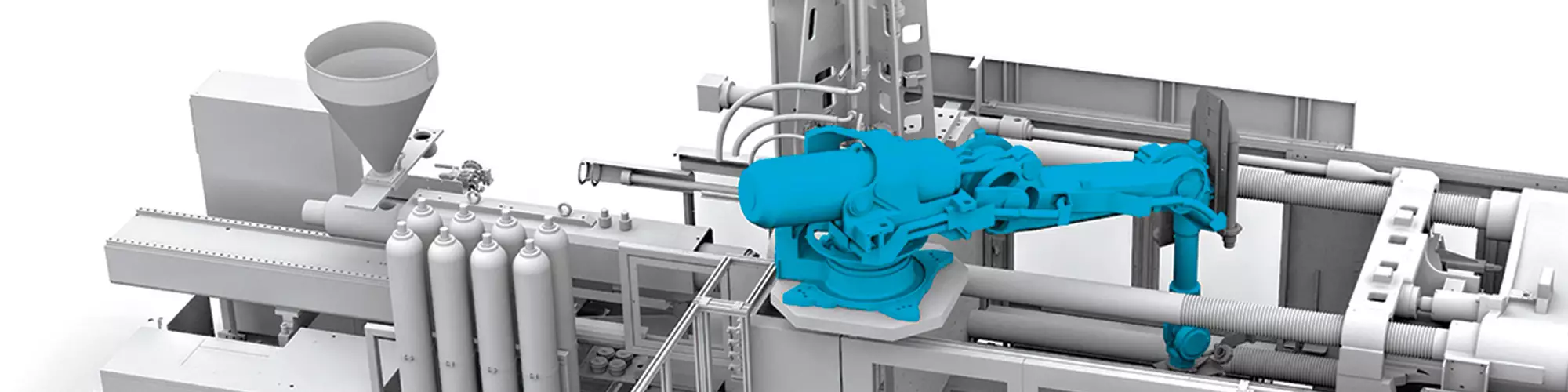
Six-axis robots can be machine-mounted to save floor space.
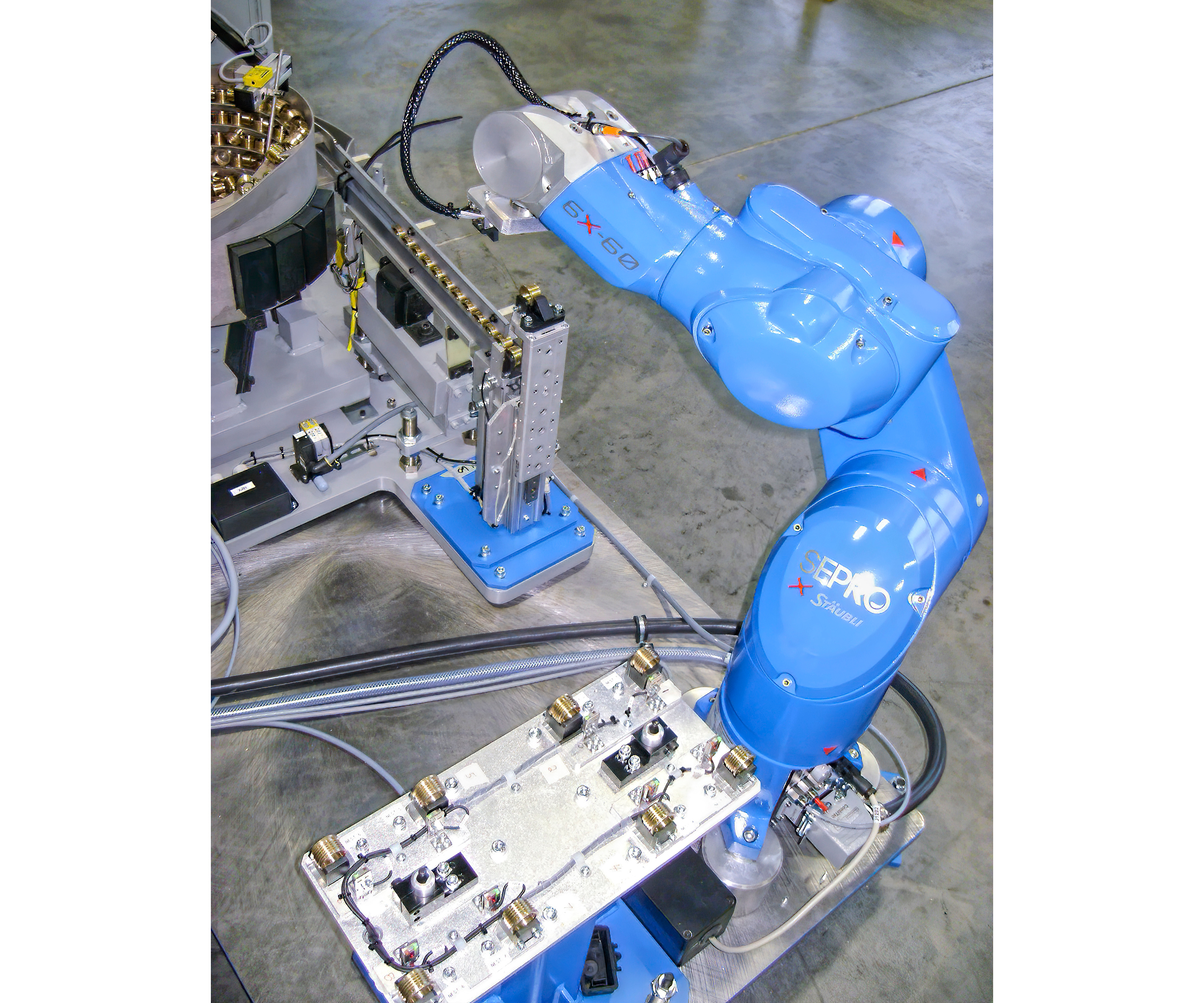
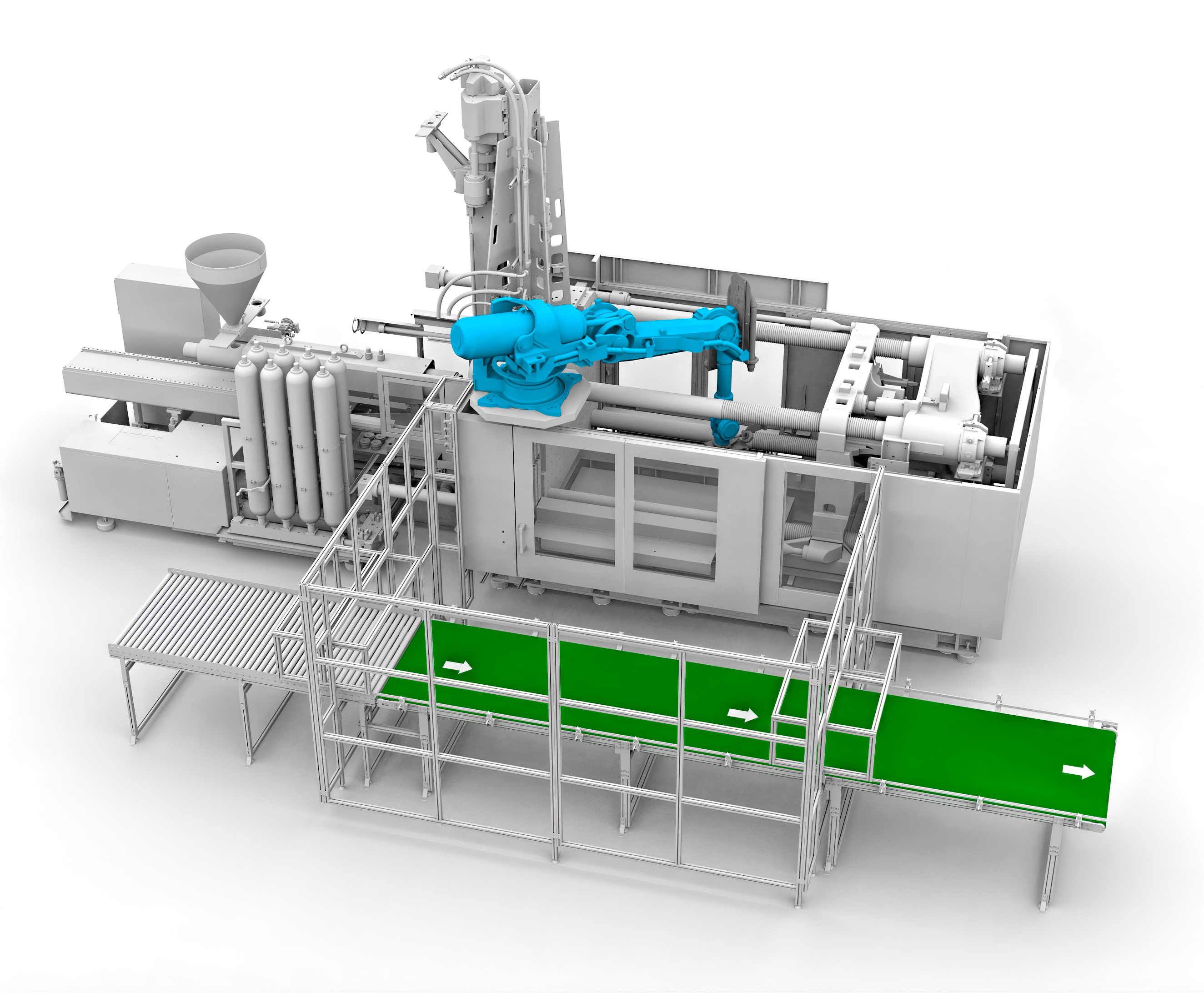
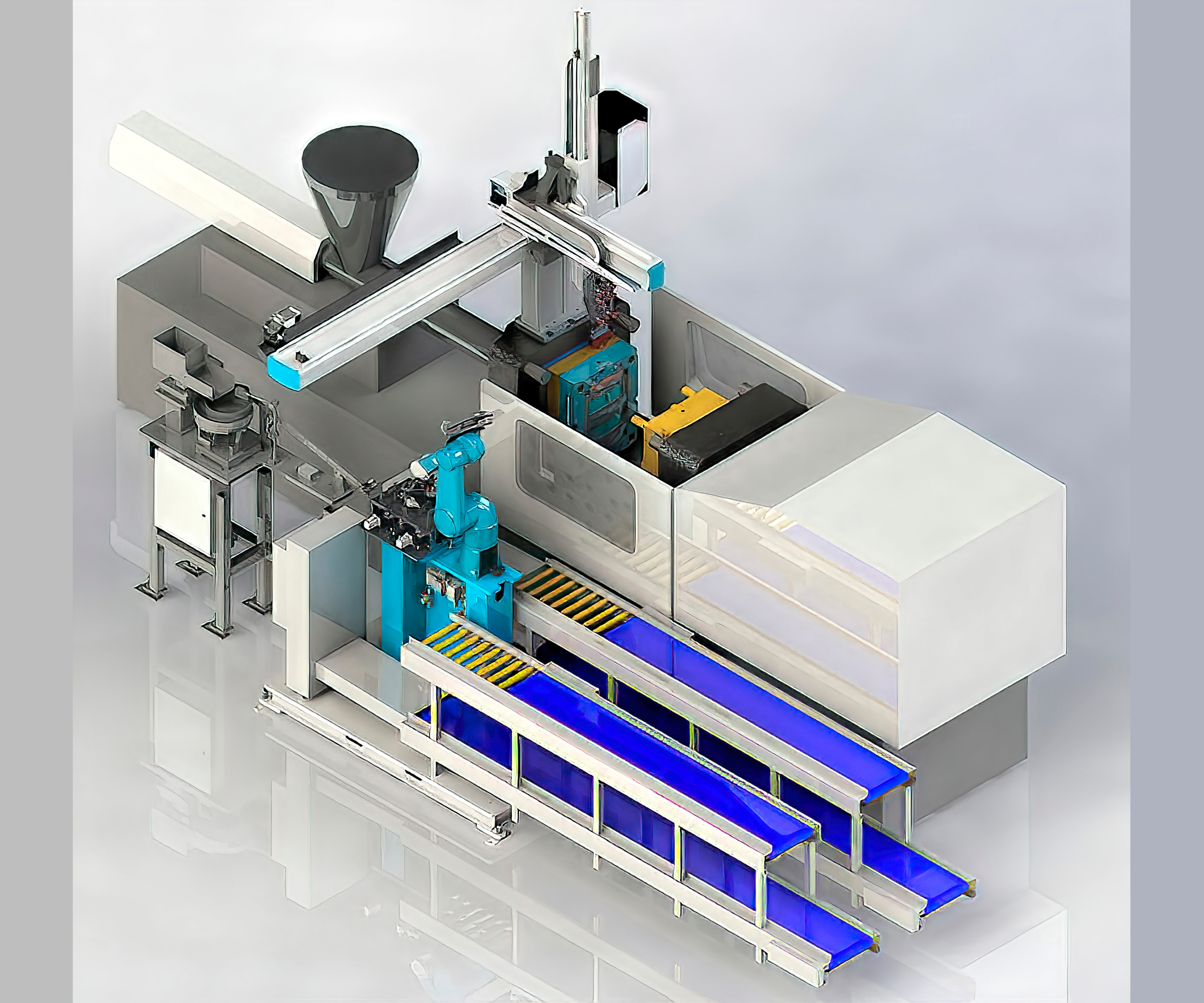
Here, a six-axis robot picks inserts from a bowl feeder and places them in a fixture for pickup by a three-axis Cartesian robot, which puts them in the mold and removes finished parts, as shown in the overall cell view.

The SeproBot concept uses the speed and versatility of a conventional six-axis robot (or a Cartesian model), surrounded by physical guarding but giving operators safe access through openings protected by sensors, light curtains or other safety devices. The robot will slow down as a person approaches, and stop if approached closer. As the person moves away, the robot will resume motion—first slowly, then at normal speed.



Which is better for injection molding applications—Cartesian beam robots, six-axis articulated-arm robots, or collaborative robots (cobots)? That’s a little like asking which is better for cooking—a frying pan or a spaghetti pot. You could scramble an egg in a spaghetti pot and you could boil pasta in a frying pan, but you probably wouldn’t like the results. Each tool has its place in the kitchen. The trick is to know which is best for your application.
Sepro sells more Cartesian units than articulated-arm robots. Today, we offer plastics processors a choice of all three major robot technologies, as well as integrated automation solutions that may incorporate more than one configuration working together to perform different functions. But let’s look specifically at where six-axis articulated-arm robots fit in an injection molding plant.



ARTICULATED-ARM FLEXIBILITY
Probably the greatest strength of articulated-arm robots is their versatility. The typical six-axis unit has an arm that is similar, in many ways, to the human arm. It can rotate around its base like the human limb rotates around the shoulder. It can bend in the middle like a human elbow and it has a wrist that can rotate and move the hand in an up-and-down or side-to-side arc. Thus, an articulated-arm robot can grip an object at almost any angle and at almost any point within its reach.
This is probably why it is the most common design across the general industrial landscape. Six-axis robots are used for welding, painting, material handling, laser cutting, gluing, assembly, quality testing, etc. And they can be used for machine tending, including part removal from injection molding machines.
This flexibility of operation, however, also means that their control systems must also be flexible, able to operate the robot in almost any application. With some exceptions, which we will get to shortly, this means that programming an articulated-arm robot for part removal can be much more complicated than programming a Cartesian robot that comes with a control system developed specifically for injection molding. Even straight-line movement of an articulated-arm robot requires coordination of several different articulated joints. Some molders feel they need specially trained personnel to handle the programming and maintenance of these robots.
All that has changed. For example, Sepro recently introduced its 6X Line of articulated-arm units adapted to use the same Visual control systems as its Cartesian robots. Using simple pick-and-place programming, the user only needs to identify step-by-step the different points and positions in the robot cycle (picking, quality inspection, unloading, stacking, etc.). Then the operator manually “teaches” the robot the path between each point, and the trajectory (either straight-line or curvilinear) is computed automatically. Thus, injection molders today will find six-axis robots much easier to program and operate than in the past. They can now evaluate Cartesian and articulated-arm configurations solely on the basis of which suits their application best.
FLOORSPACE REQUIREMENTS
Another common criticism of six-axis robots is the amount of floorspace they can require. While Cartesian robots are generally mounted above the fixed platen of a molding machine and operate mostly above and near the side of the machine, articulated-arm robots are most commonly positioned on the floor beside the press. For plants with limited overhead clearance, this can be an advantage, but it does mean that they can require a lot of floorspace. What’s more, they can only operate on one side of the molding machine—usually the back of the machine where they will not interfere with access to the operator control panel.
Sometimes, floor mounting can be an advantage, as in vertical-clamp insert molding. Positioned beside the machine, their movement is not limited by the vertical clamp and they can easily reach multiple stations on the rotary table often found on those machines.. (For a case where Cartesian robots were an efficient choice in vertical molding, see here.)
However, six-axis robots do not have to be floor-mounted. They can be mounted above the mold, on the fixed platen, on a nearby wall or even the ceiling, when the application and the working environment allow.
OTHER FACTORS TO CONSIDER
There are other factors that set articulated-arm robots apart from their Cartesian cousins:
• Speed. The speed of articulated-arm robots has increased in recent years to a point where it is comparable to Cartesian types in many motions; but beam robots are generally regarded as being faster at moving into and out of the mold space to retrieve parts. This is why most fast-cycling molding applications employ Cartesian beam robots or purpose-built side-entry units.
• Payload. The largest of Sepro’s beam robots can manage a payload (part plus EOAT) of about 200 lb. In contrast, its largest six-axis robots, sized for molding machines of the same tonnage, can handle 250 lb or more, depending on how long a reach is required. Maximum payload generally is lower as reach gets longer.
• Cost. The cost of articulated-arm robots has been coming down lately, but as a general rule a Cartesian robot—even with the addition of the servo-driven wrist—will cost about 30% less than a six-axis unit.
Cartesian and articulated-arm robots are sometimes used together. The machine-mounted beam robot picks the part and presents it to the articulated-arm unit for secondary operations. This may be the ideal setup when molding cycles are relatively short and downstream functions are especially numerous, complicated or time-consuming.
A WORD ABOUT COBOTS
In the plastics industry, most so-called “collaborative robots” or “cobots” are quite similar in design to six-axis articulated-arm units. The big differences are the sensors and other features that allow cobots to recognize the presence of human operators and avoid conflicting movements that could cause injury. Cobots, proponents say, are even more flexible than six-axis robots and easier to program. The advantage of standard articulated-arm robots over cobots are generally higher speed and payload capacities, and the primary negatives are lack of portability and the need for guarding.
Sepro Group is now partnering with Universal Robots, market leader in collaborative robots. This allows molders to implement cobots more easily into their operations. In addition, by adding the Visual control to the leading cobot for the first time, Sepro Group ensures seamless integration of the UR technology with other Sepro robots and the molding machine.
Sepro has also developed systems that offer a middle ground. Called SeproBot, this approach uses a conventional six-axis unit or Cartesian robot surrounded by physical guarding, yet giving operators safe access through openings protected by sensors, light curtains, or other safety devices. Most of the time, the robot operates at full speed, slowing down or stopping only when humans enter the guarded space and returning to full speed when they depart. This enables the SeproBot to operate two to three times faster than a typical cobot, while still allowing safe interaction between robot and human.
Just as Cartesian and articulated-arm robots may be used together to integrate machine tending with downstream operations, cobots with Visual control can also be used to develop safe, open, multi-robot configurations for various types of processes, including peripheral operations or advanced automation cells.
About the Author
Claude Bernard
Claude Bernard has spent most of the last 30 years with Sepro Group in France, where he currently holds the titles of director of product marketing and key accounts manager. He holds a degree in Automation and Robotic Engineering from École Centrale de Nantes, France. Contact: communication@sepro-group.com; sepro-america.com.
















Related Content

How Was K 2022 for Blow Molding?
Over a dozen companies emphasized sustainability with use of foam and recycle, lightweighting and energy savings, along with new capabilities in controls, automation and quick changeovers.
Read More
System Offers 'Lights Out' Mold-Channel Cleaning & Diagnostics
New system automatically cleans mold-cooling lines—including conformal channels—removing rust and calcium, among other deposits, while simultaneously testing for leaks, measuring flow rate and applying rust inhibitor.
Read More
Automation in Thermoforming on the Rise
Equipment suppliers’ latest innovations exemplify this trend driven by factors such as labor shortages, higher-speed thermoformers and tighter quality control.
Read More
Five Ways to Increase Productivity for Injection Molders
Faster setups, automation tools and proper training and support can go a long way.
Read MoreRead Next

Processor Turns to AI to Help Keep Machines Humming
At captive processor McConkey, a new generation of artificial intelligence models, highlighted by ChatGPT, is helping it wade through the shortage of skilled labor and keep its production lines churning out good parts.
Read More
Troubleshooting Screw and Barrel Wear in Extrusion
Extruder screws and barrels will wear over time. If you are seeing a reduction in specific rate and higher discharge temperatures, wear is the likely culprit.
Read More
Lead the Conversation, Change the Conversation
Coverage of single-use plastics can be both misleading and demoralizing. Here are 10 tips for changing the perception of the plastics industry at your company and in your community.
Read More