
Robot Controllers Evolve Toward Greater Flexibility, Connectivity, Ease of Use
Robot controls have undergone steady and fairly rapid evolution. If all your robot controls are not of the latest generation, this overview could convey what opportunities upgrading may offer, as well as a sense of where the technology may be going next.
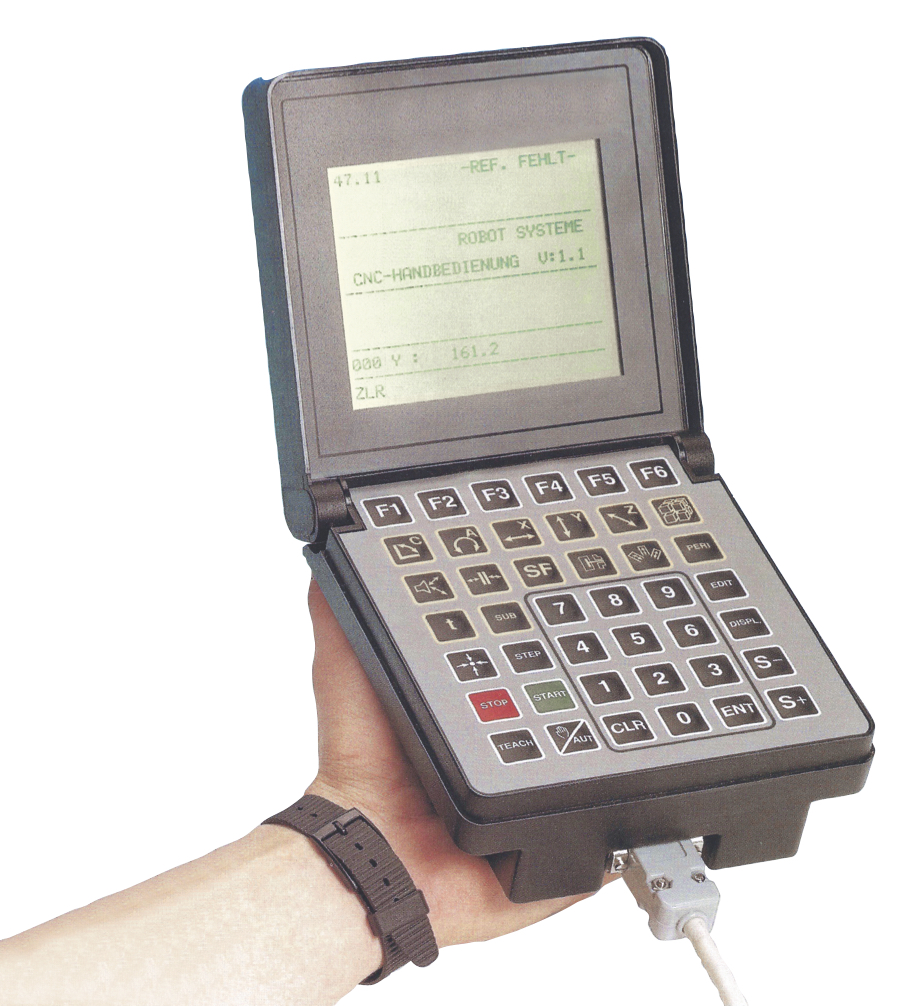
Older controllers utilized either “open-architecture” or “canned” (mode-based) programming—each of which had its advantages and disadvantages. (Shown here: an early Wittmann CNC robot controller.)
“Open-architecture” programming offered advantages for more complex programming—such as to integrate robots with downstream operations. But older systems required computer-programming experience. Todays controller wizards and text editors have eliminated that hurdle.

Early “canned” programming was suited to simple pick-and-place robot applications but became cumbersome and expensive when custom functions were required.
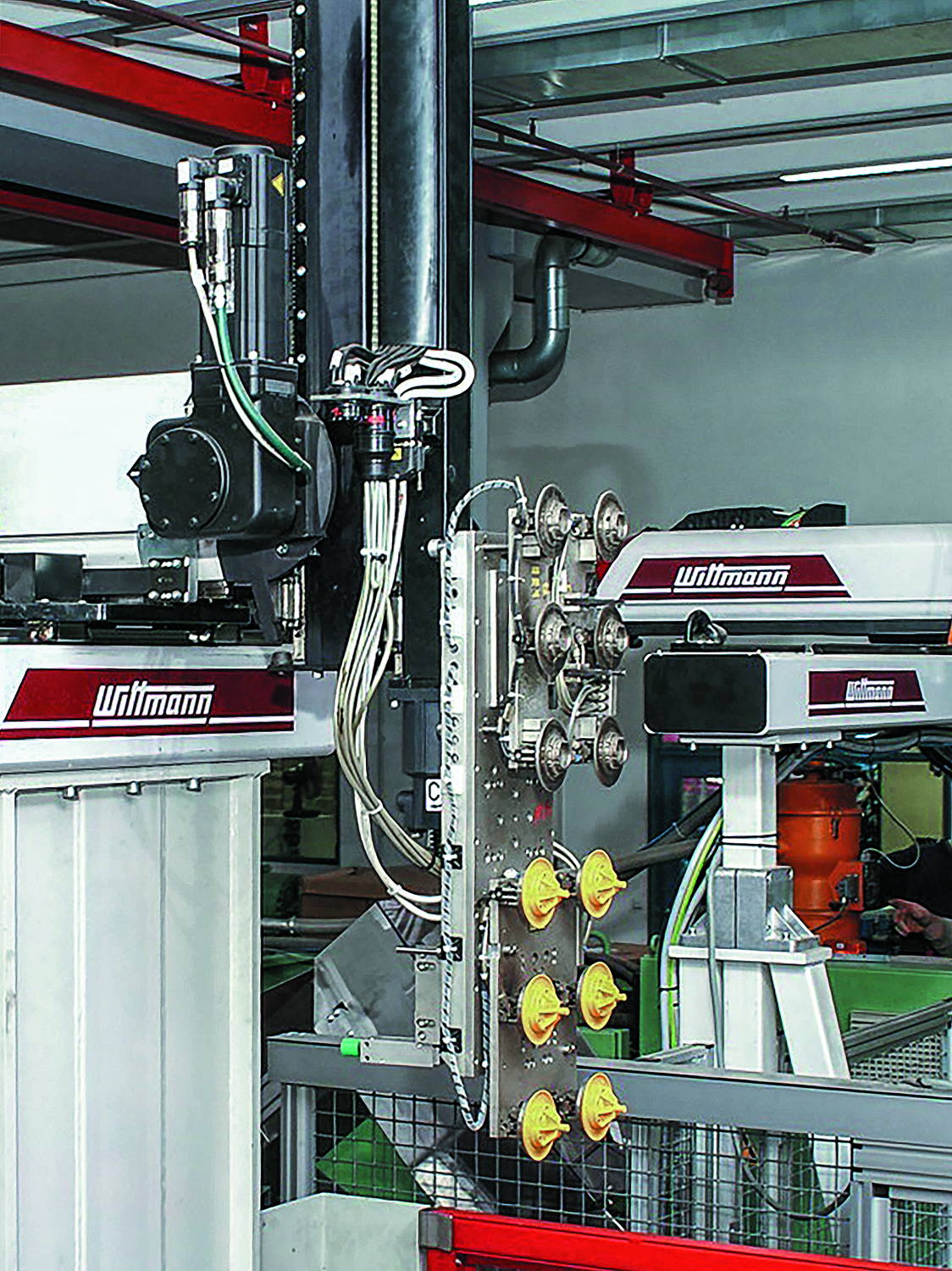
Today’s intelligent robot controls allow the robot to find the optimal time to enter the mold area—even before the mold is fully open—and also can monitor torque applied to the ejector motor to pull the robot arm back as the parts come forward.
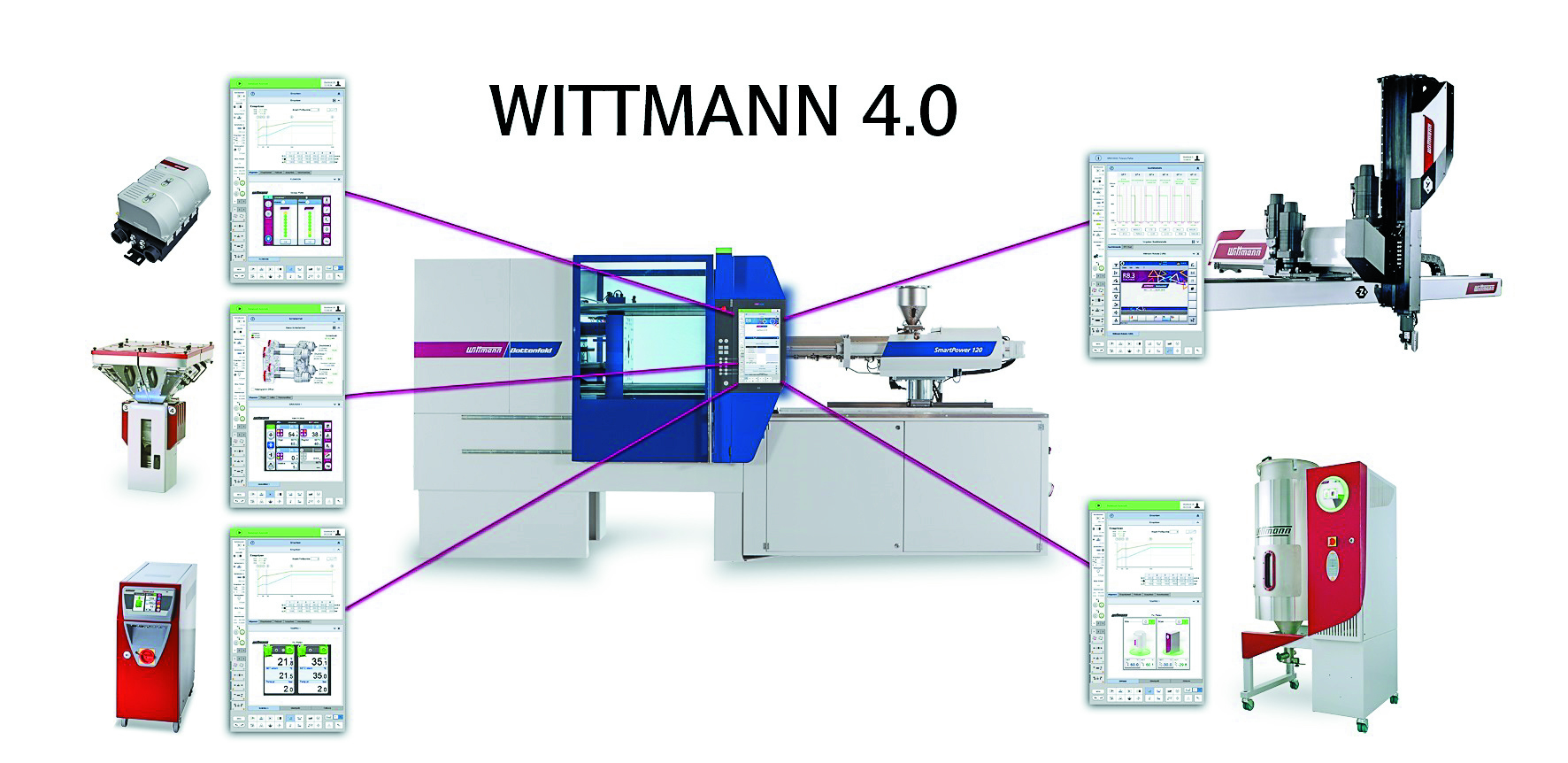
The trend toward Industry 4.0 connectivity (or “Wittmann 4.0” in that company’s implementation) encourages integration of robots and other molding-cell auxiliaries with the molding machine controller.
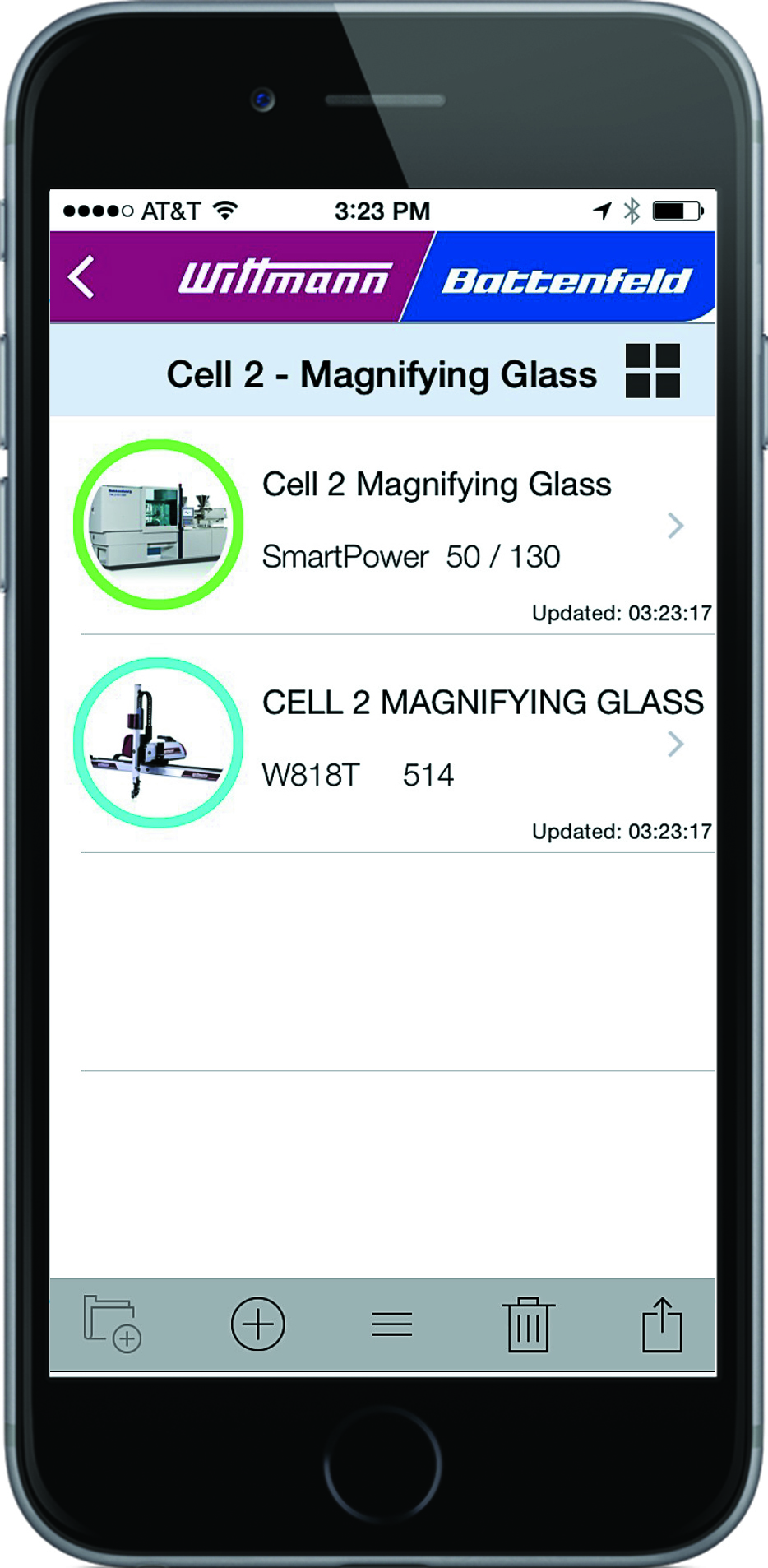
Another example of Industry 4.0 implementation is Wittmann’s QuickLook app for mobile devices, which shows the color-coded status of all machines and robots in a plant. (Green = automatic operation; Blue =non-automatic operation; Red = safety criteria out of compliance.)

Wittmann’s R9 robot control viewed on the company’s B8 injection press controller.



In the time before large touchscreens, colorful graphics, and the ability to connect to the internet, there were simple seven-segment displays, rotary dial timers, and mechanical toggle switches. If it sounds like I am talking about computers, in a sense I am. More specifically, this article will discuss the evolution of a very specific type of computer: the robot controller. This is more than just a history lesson; it’s meant to give you a better sense of where the technology stands today by understanding how it got here—and where it may be going in the future. Since not all readers may have the latest generation of robot controls, this review may give them a sense of what may be gained by upgrading to the state of the art.
THE EARLY DAYS
In the infancy of automation in the plastics industry, robots were fairly simple machines, utilizing primarily pneumatic cylinders with only the occasional electric motor drive. As the use of electric motors became more prevalent, the capabilities of robot controllers had to keep pace. In the 1980s, robots became noticeably more prominent in plastics processing.



The trend seemed to be directly in step with the personal-computer revolution of the same time period. As computers became more of a part of everyone’s daily life, they were simultaneously becoming critical components of the workplace.
The plastics industry was no exception, with robot controllers keeping up with new advances in personal computing technology. The goal of both personal computing and industry computing at the time was not just to make a more user-friendly interface, but to add more powerful capabilities and features to help increase productivity.
PROGRAMMING DEBATE
Early on, the robot industry in plastics had two very different schools of thought when it came to how the ever-improving machines should be programmed. One was to give the users complete freedom to do whatever they wanted within the physical limitations of the robot. Many refer to this style as “open-architecture” programming. The other school of thought brought about “canned” or “mode-based” programming.
This style allowed the user to have a handful of options within the program to choose from. Each method had both benefits and drawbacks. For the “open-architecture” programming method, the advantage was that users could create their own custom sequences for anything from inserting and degating applications to controlling complex downstream automation. The user could do all this without ever needing to contact the robot manufacturer for assistance. This flexibility was appealing to users with existing knowledge of what they wanted to do and how they wanted to do it; and it expanded the range of capabilities to include everything the hardware was capable of.
The main drawback to this style was exactly what made it so advantageous when a custom program was needed. For even a simple pick-and-place application, the user was required to write a line-by-line structured program. Although this was very flexible, it was not intuitive enough for those with limited programming experience. Especially in the earliest days of computers, not many in the plastics industry or elsewhere were equipped to write programs for crucial sequences in the manufacturing process.
On the other end of the spectrum, you had the “canned program” approach. This made it much simpler for the pick-andplace user. There was only a handful of options from which to select, that could carry out basic, but commonly used, functions—like sprue pick/release, yes/no, vacuum or gripper to pick the part, flip before traverse, etc. Based on these selections, the operator was then able to specify the required positions and the program, and robot, were ready to go.
This made common, simpler applications like pick and place easy and intuitive, but it was limited. When it became necessary to expand the robot’s capabilities beyond what these few basic options allowed, the operator typically had to contact the robot manufacturer to order custom programs. This was usually expensive, not only because of the price of the software, but also because it took weeks or months of lead time, which led to production downtime unless the user had prepared that far in advance. Then once the new program was installed on the customer’s floor, if issues presented themselves, the customer would have to wait once again for the manufacturer’s technician, and keep returning to the vendor until the bugs were worked out.
As mentioned, each style had its distinct advantages and disadvantages. In an attempt to get the best of both methods, robot manufacturers started trying to find ways to marry the two types. Unfortunately, for many years, nobody was able to find an ideal way to do it. It seemed as much as they tried, they always fell back into leaning one way or the other.
STORAGE MEDIA & DISPLAYS
Through the 1980s and 1990s, robot manufacturers used various storage media to back up their program. Once again, robot controllers followed the lead of the personal-computing industry. In a seemingly yearly transition, storage devices included 5.5-in. floppy disks, Smart Media, Compact Flash, and other quickly forgotten relics of the era. The industry standard seems to have finally landed on USB drives for its portable media, at least for the time being. However, the newest generation of controllers also offer networking options, which gives them the ability to centralize data backups and programs to a company server.
As technology progressed, there also appeared more beautiful graphics and touchscreen controllers. The old DOS-code displays were replaced by bright, colorful, and easy to understand icons and screens. Navigation between necessary tasks was made simple, and learning to use the controllers became accessible for anyone who could read the screen.
ADVANCED PROGRAMMING METHODS
It was not until fairly recently that there finally emerged some companies that began to create a more optimal way to marry the open-architecture and the “canned” programming styles. These companies incorporate a “wizard” with “lead-through” programming that walks the user step by step through the basic program setup, utilizing videos and simplified language. These wizards help to make the setup practically foolproof, even for those with limited programming experience. The user is able to set up basic functions like pick-and-place programs in a matter of minutes.
Intelligent controls allow the robot to enter the mold area before it is fully open, without the extra cost for additional sensors, as was required by earlier “moldfollowing” routines.
Generally, once the basic program sequence is created, if the user needs to modify it beyond what is defined in the wizard, they can then move into some sort of “text editor” function to gain complete program freedom. The text editor provides a userfriendly, intuitive way to modify the sequence beyond what the wizard provides, with far more available options for users in need of more unique functionality. This provides an extremely easy way for the user to create custom programs that allow the robot to do whatever the hardware allows—which, with today’s robots, is essentially anything that can be dreamed up. The sky seems to be the limit with the new generation of controllers. Although there are still the older-style controllers in our industry, to get the most out of personnel, molding applications, cycle times, and robots, most users have seen the need to move to robots that offer the features mentioned above. They allow for full flexibility in molding but still retain the ability to have quick changeovers safely and efficiently.
EXPANDED PROCESSING POWER & INTELLIGENCE
As robots advanced, the controls gained processing power and became increasingly intelligent. One such innovation was mold following. This requires extra hardware to be installed on the press. A transducer is plugged into the robot through a special interface; it allows the robot to know the position of the mold and how fast it is traveling. Once this information is processed, it allows the robot to enter the mold and follow its opening sequence. This process saves cycle time, as the robot doesn’t have to wait for the mold to be all the way open before entering the mold. However, the extra cost and programming have made this option less attractive to some, as the ROI can be slow to develop.
Parallel with the continuously improving simplicity of setup and increased processing power was the evolution of greater intelligence. There now exist features such as artificial intelligence that allows robots to know independently when it is the optimal time to enter the mold, just prior to the complete mold-open signal. This is not the same as “mold following,” where extra transducers are required on the molding machine, but rather it is an intelligent system that allows the robot’s initial acceleration stages to happen while the mold is in the process of opening, creating a more efficient process than anyone could program specifically. These smart robots are becoming increasingly advanced, and will likely continue to push the boundaries of cycle optimization.
It also used to be common to have robots whose kick-axis brake was released to allow the ejector to “push” the arm back with the parts. History has shown this to be a bad method to accomplish this “ejector following” technique. With smarter controllers, users are now able to monitor the torque applied to the motor during the ejector push motion and apply the appropriate counter power to help pull the arm back. The user doesn’t even see this happening—it all runs in the background.
NEXT UP: ‘INDUSTRY 4.0’
The biggest advance in the 21st century has been the move towards internet connectivity. In our personal lives, many of us have become accustomed to computers, now generally attached to our person via phones, watches, or even eyeglasses, providing instantaneous information, whether it be news, e-mails, text messages, or what our friends had for lunch. We now expect the same rapidity of information reporting from manufacturing equipment. Users, department managers, and business owners all want to know when their equipment is working and when it is not. If that function doesn’t exist, there is an increasingly common desire to look for the newest generation of controllers that can easily be connected to the internet to provide this crucial information.
Everything from e-mail alerts when a robot stops, to being able to remotely access information such as cycle times is fast becoming the norm in robot controllers. When a robot goes down, be it from an alarm or a need for a special software sequence, a user should be able to have the robot manufacturer connect remotely to the equipment to get the robot back up and running in an instant. The time savings are massive, but the stress and energy saved have become equally valuable.
As the plastics industry makes a push towards the networked “smart factory” or Industry 4.0, a few companies already are actively implementing it. For example, one such company, Wittmann Battenfeld, offers a fully integrated molding-cell solution. The robot and auxiliary equipment can be integrated into the molding machine controller. This offers the same advantages previously discussed, but for the entire molding cell, not just the robot. The robot pendant can be on the rear side of the machine, for operation on either side. Conversely, it also allows operating the molding machine via the robot controller, which has had its capabilities expanded to include the entire cell as well.
ABOUT THE AUTHOR: Jason Cornell has worked in the plastics injection molding industry for over 20 years, specializing in robotics and automation. His career started as a service engineer with Star Automation; he also worked at Husky and Yushin America. At Wittmann Battenfeld, Cornell has been the Western Regional Manager of the Robots & Automation Div. for the past six years. He is based out of the company’s Southern California Technical Center in Placentia, Calif. Contact: jason.cornell@wittmann-group.com.
















Related Content

Real-Time Production Monitoring as Automation
As an injection molder, Windmill Plastics sought an economical production monitoring system that could help it keep tabs on its shop floor. It’s now selling the “very focused” digital supervisor it created, automating many formerly manual tasks.
Read More
An Automation 'First' for Non-Servo-Eject Trim Presses
Compact, flexible and configurable robotic system is said to be the first to enable thermoformers to fully automate product handling after a non-servo trim press.
Read More
Drones and Injection Molding Ready for Takeoff
Drones and unmanned aerial vehicles (UAV) are approaching an inflection point where their production volumes — and functionality — will increasingly point to injection molding.
Read More
Processing Megatrends Drive New Product Developments at NPE2024
It’s all about sustainability and the circular economy, and it will be on display in Orlando across all the major processes. But there will be plenty to see in automation, AI and machine learning as well.
Read MoreRead Next

Advanced Recycling: Beyond Pyrolysis
Consumer-product brand owners increasingly see advanced chemical recycling as a necessary complement to mechanical recycling if they are to meet ambitious goals for a circular economy in the next decade. Dozens of technology providers are developing new technologies to overcome the limitations of existing pyrolysis methods and to commercialize various alternative approaches to chemical recycling of plastics.
Read More
Understanding Melting in Single-Screw Extruders
You can better visualize the melting process by “flipping” the observation point so that the barrel appears to be turning clockwise around a stationary screw.
Read More
Lead the Conversation, Change the Conversation
Coverage of single-use plastics can be both misleading and demoralizing. Here are 10 tips for changing the perception of the plastics industry at your company and in your community.
Read More